专栏文章
题解:P5693 EI 的第六分块
P5693题解参与者 2已保存评论 1
文章操作
快速查看文章及其快照的属性,并进行相关操作。
- 当前评论
- 1 条
- 当前快照
- 1 份
- 快照标识符
- @minob30e
- 此快照首次捕获于
- 2025/12/02 05:40 3 个月前
- 此快照最后确认于
- 2025/12/02 05:40 3 个月前
Description
给定序列 ,执行 次操作,分两种:
1 l r k:对每个 执行 。2 l r:求 。
Limitations
Solution
因为要求最大子段和,需要维护 ,这一步很经典,不说。
然后有一个问题,区间加后, 的变化无法快速计算。
考虑把每个量写成一次函数 ,其中 为所选的区间长度,那么若所选区间不变,就直接让 加上 。
但因为 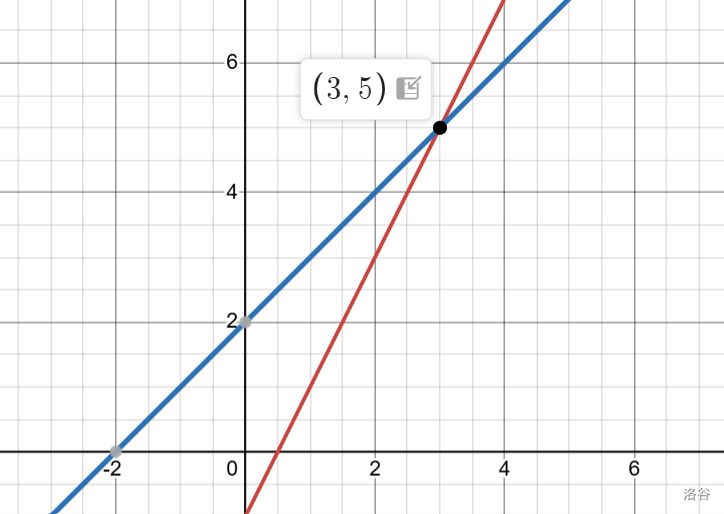
pushup 时会取 ,所选区间不是一成不变的,有时会遇到下面情况:
在 时蓝色更优,但 时红色更优。
所以我们要维护当前 到交点的距离 (若交点的 坐标小于 或不交则视为 ),每次修改将 减去 ,当 时,所选函数会变化,需要重构整棵子树。为了正确性,交点需要取
pushup 时所有取 决策中最小的(还要包括两棵子树的 )。剩下的和普通线段树一样,做完了。
根据 为正数的性质,用势能分析可得时间复杂度约为 ,然而卡不满,所以能过。
code
CPP#include <bits/stdc++.h>
using namespace std;
using i64 = long long;
using ui64 = unsigned long long;
using i128 = __int128;
using ui128 = unsigned __int128;
using f4 = float;
using f8 = double;
using f16 = long double;
template<class T>
bool chmax(T &a, const T &b){
if(a < b){ a = b; return true; }
return false;
}
template<class T>
bool chmin(T &a, const T &b){
if(a > b){ a = b; return true; }
return false;
}
namespace Fastio {}
using Fastio::qin;
using Fastio::qout;
constexpr i64 inf = 4e18;
struct line {
int k; i64 b;
inline line() : line(0, 0) {}
inline line(int _k, i64 _b): k(_k), b(_b) {}
inline void add(i64 v) { b += k * v; }
};
inline line operator+(const line& lhs, const line& rhs) {
return line(lhs.k + rhs.k, lhs.b + rhs.b);
}
inline pair<line, i64> _max(const line& a, const line& b) {
if (a.k < b.k || (a.k == b.k && a.b < b.b)) return _max(b, a);
if (a.b >= b.b) return make_pair(a, inf);
return make_pair(b, (b.b - a.b) / (a.k - b.k));
}
struct info {
line pre, suf, ans, sum;
i64 x;
inline info() {}
inline info(line pre, line suf, line ans, line sum, i64 x)
: pre(pre), suf(suf), ans(ans), sum(sum), x(x) {}
};
inline info operator+(const info& a, const info& b) {
i64 x0 = min(a.x, b.x);
line sum = a.sum + b.sum;
auto [pre, x1] = _max(a.pre, a.sum + b.pre);
auto [suf, x2] = _max(b.suf, a.suf + b.sum);
auto [tmp, x3] = _max(a.ans, b.ans);
auto [ans, x4] = _max(tmp, a.suf + b.pre);
return info(pre, suf, ans, sum, min({x0, x1, x2, x3, x4}));
}
inline void operator+=(info& a, i64 v) {
a.x -= v;
a.pre.add(v), a.suf.add(v);
a.sum.add(v), a.ans.add(v);
}
struct node {
int l, r;
info dat;
i64 tag;
};
inline int ls(int u) { return 2 * u + 1; }
inline int rs(int u) { return 2 * u + 2; }
struct ktt {
vector<node> tr;
inline ktt() {}
inline ktt(const vector<i64>& a) {
const int n = a.size();
tr.resize(n << 1);
build(0, 0, n - 1, a);
}
inline void pushup(int u, int mid) { tr[u].dat = tr[ls(mid)].dat + tr[rs(mid)].dat; }
inline void apply(int u, i64 v) { tr[u].tag += v, tr[u].dat += v; }
inline void pushdown(int u, int mid) {
if (tr[u].tag) {
apply(ls(mid), tr[u].tag);
apply(rs(mid), tr[u].tag);
tr[u].tag = 0;
}
}
inline void build(int u, int l, int r, const vector<i64>& a) {
tr[u].l = l, tr[u].r = r;
if (l == r) {
line f(1, a[l]);
tr[u].dat = info(f, f, f, f, inf);
return;
}
const int mid = (l + r) >> 1;
build(ls(mid), l, mid, a);
build(rs(mid), mid + 1, r, a);
pushup(u, mid);
}
inline void defeat(int u, i64 v) {
const int mid = (tr[u].l + tr[u].r) >> 1;
if (v > tr[u].dat.x) {
defeat(ls(mid), tr[u].tag + v);
defeat(rs(mid), tr[u].tag + v);
tr[u].tag = 0;
pushup(u, mid);
}
else apply(u, v);
}
inline void update(int u, int l, int r, i64 v) {
if (l <= tr[u].l && tr[u].r <= r) return defeat(u, v);
const int mid = (tr[u].l + tr[u].r) >> 1;
pushdown(u, mid);
if (l <= mid) update(ls(mid), l, r, v);
if (r > mid) update(rs(mid), l, r, v);
pushup(u, mid);
}
inline info query(int u, int l, int r) {
if (l <= tr[u].l && tr[u].r <= r) return tr[u].dat;
const int mid = (tr[u].l + tr[u].r) >> 1;
pushdown(u, mid);
if (r <= mid) return query(ls(mid), l, r);
if (l > mid) return query(rs(mid), l, r);
return query(ls(mid), l, r) + query(rs(mid), l, r);
}
inline void range_add(int l, int r, i64 v) { update(0, l, r, v); }
inline i64 range_gss(int l, int r) { return max(query(0, l, r).ans.b, 0LL); }
};
signed main() {
ios::sync_with_stdio(0);
cin.tie(0), cout.tie(0);
int n, m;
qin >> n >> m;
vector<i64> a(n);
for (int i = 0; i < n; i++) qin >> a[i];
ktt tree(a);
for (int i = 0, op, l, r; i < m; i++) {
qin >> op >> l >> r, l--, r--;
if (op == 1) {
i64 v; qin >> v;
tree.range_add(l, r, v);
}
else qout << tree.range_gss(l, r) << '\n';
}
return 0;
}
相关推荐
评论
共 1 条评论,欢迎与作者交流。
正在加载评论...