专栏文章
题解:P3259 [JLOI2014] 路径规划
P3259题解参与者 2已保存评论 1
文章操作
快速查看文章及其快照的属性,并进行相关操作。
- 当前评论
- 1 条
- 当前快照
- 1 份
- 快照标识符
- @miq1mzll
- 此快照首次捕获于
- 2025/12/03 21:29 3 个月前
- 此快照最后确认于
- 2025/12/03 21:29 3 个月前
写在前面
-
将原图记作 ;
-
表示从当前起点出发,到达 ,经过 个红绿灯,所需最小时间;
-
集合 所有加油站,,。
First
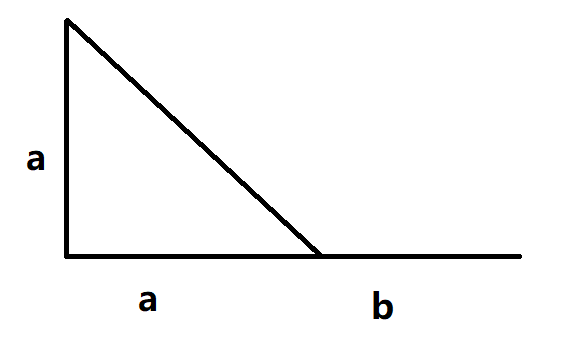
红灯的平均等待时间怎么求?
等待时间(平均)=总等待时间/总时间,
也就是 。
用下图思考会更易理解,总等待时间其实就是三角形面积。
Second
看到“最多经过 个红绿灯”,果断分层图 Dijkstra(SPFA)。
Third
注意到加油站的数量比较少,考虑从此下手,我们可以将加油站作为“中转点”,在原 上跑 Dijkstra(SPFA)。
Fourth
对于:任意 ,暴力求出 到达 的 (跑 Dijkstra(SPFA)时,若 ,就
continue),再建一张图,记作 。Fifth
最后只需以 为起点,在 上跑分层图即可。
Last:时间复杂度
以 Dijkstra 为例,设加油站的数量为 。
第一次 Dijkstra 的复杂度是 。
第二次 Dijkstra 的复杂度是 (边数最多是 )。
所以最终复杂度 。
最后的最后(这个才是你们要的)。
CPP#include<bits/stdc++.h>
#define int long long
#define mp(x,y,p) make_pair(x,make_pair(y,p))
#define se second
#define fi first
using namespace std;
using PII=pair<int,int>;
using PDII=pair<double,PII>;
const int maxn=2e4+5;
const int maxm=4e5+5;
const double INF=1e18;
int n,m,K,Limit,Cost,s,t;
double Time[maxn];
unordered_map<string,int> Map;
vector<int> Gas;
struct Edge{int v,c,next; double w;};
struct Graph
{
int head[maxn],tot;
Edge e[maxm];
double dist[15][maxn];
bool vis[15][maxn];
Graph()
{
memset(head,-1,sizeof(head));
tot=-1;
}
void add(int u,int v,double w,int c)
{
e[++tot]=(Edge){v,c,head[u],w};
head[u]=tot;
}
priority_queue<PDII,vector<PDII>,greater<PDII> >q;
void init()
{
int i,j;
for(i=0;i<=K+1;i++)
{
for(j=0;j<=n+1;j++)
dist[i][j]=INF,vis[i][j]=0;
}
}
void Dijkstra(int s)
{
int i; init();
q.push(mp(0,0,s));
dist[0][s]=0;
while(q.size())
{
int k=q.top().se.fi,x=q.top().se.se;
q.pop();
if(vis[k][x])
continue;
vis[k][x]=1;
for(i=head[x];~i;i=e[i].next)
{
int y=e[i].v,c=e[i].c; double w=e[i].w;
if(k+c<=K && dist[k+c][y]>dist[k][x]+w)
{
dist[k+c][y]=dist[k][x]+w;
q.push(mp(dist[k+c][y],k+c,y));
}
}
}
}
}G[2];
bool Get_gas(string Name)
{
for(int i=0;i+2<Name.size();i++)
{
if(Name[i]=='g' && Name[i+1]=='a' && Name[i+2]=='s')
return true;
}
return false;
}
signed main()
{
ios::sync_with_stdio(0);
cin.tie(0),cout.tie(0);
int i,k,x,y,u,v;
double w; string Name;
cin>>n>>m>>K>>Limit>>Cost;
for(i=1;i<=n;i++)
{
cin>>Name>>x>>y;
Map[Name]=i;
if(x) Time[i]=1.0*x*x/(2*(x+y));
if(Name=="start") Gas.push_back(s=i);
if(Name=="end") Gas.push_back(t=i);
if(Get_gas(Name)) Gas.push_back(i);
}
for(i=1;i<=m;i++)
{
cin>>Name; u=Map[Name];
cin>>Name; v=Map[Name];
cin>>Name>>w;
G[0].add(u,v,w+Time[v],(Time[v]? 1:0));
G[0].add(v,u,w+Time[u],(Time[u]? 1:0));
}
for(int i:Gas)
{
G[0].Dijkstra(i);
for(int j:Gas)
{
if(i==j) continue;
for(k=0;k<=K;k++)
{
if(G[0].dist[k][j]>Limit) continue;
w=((j!=s && j!=t)? Cost:0);
G[1].add(i,j,G[0].dist[k][j]+w,k);
}
}
}
double ans=INF;
G[1].Dijkstra(s);
for(i=0;i<=K;i++)
ans=min(ans,G[1].dist[i][t]);
cout<<fixed<<setprecision(3)<<ans<<'\n';
return 0;
}
相关推荐
评论
共 1 条评论,欢迎与作者交流。
正在加载评论...