专栏文章
弦图:从入门到入入门
算法·理论参与者 36已保存评论 38
文章操作
快速查看文章及其快照的属性,并进行相关操作。
- 当前评论
- 38 条
- 当前快照
- 1 份
- 快照标识符
- @mhz5tw47
- 此快照首次捕获于
- 2025/11/15 01:56 4 个月前
- 此快照最后确认于
- 2025/11/29 05:25 3 个月前
总结了一下网上现有的零散弦图资料,并补充了部分证明。
由于笔者实力有限,若文中有任何问题,望指出!
目录
-
前置定义
-
引理
-
最大势算法( 算法)
-
应用
-
弦图判定
-
弦图染色问题/最大团问题
-
弦图最小团覆盖/最大独立集
-
区间图
-
前置定义
基础定义:
-
完全图:对于任意的点 ,有 。

-
弦:连接环上不相邻两个点的边。

-
子图:点集为原图点集子集,边集为原图边集子集。
-
导出子图:点集为原图点集子集,边集为所有满足 两个端点均在选定点集中 的图。
-
团:完全子图(显然一定是导出子图)。
-
点割集:若点集 是 的点割集,则在原图中删除 的导出子图后, 不连通。
-
极小点割集:若点集 是 的极小点割集,不存在 的点割集 满足 。
 是 的点割集、极小点割集。
是 的点割集、极小点割集。 -
最大团:点数最多的团。
-
极大团:若点集 的导出子图是极大团,则不存在点集 的导出子图是团,且 。
 红色部分是原图的子图、导出子图、团、最大团、极大团。
红色部分是原图的子图、导出子图、团、最大团、极大团。 -
弦图:任意大于 的环都有弦的无向图。

 左图是弦图而右图不是。因为右图存在一个 的长度为 的环,且没有弦。
左图是弦图而右图不是。因为右图存在一个 的长度为 的环,且没有弦。
为解决弦图问题引入的定义:
-
单纯点:设与点 相连的点集为 ,若 为单纯点,则点集 的导出子图是一个团。
-
完美消除序列:令 ,完美消除序列为一个 的排列 ,满足 在点集 的导出子图中是单纯点。上述弦图存在一个完美消除序列 ,单纯点有 。
引理
弦图的导出子图为弦图。
-
证明:由定义可知,
所有满足 两个端点均在选定点集中 的边都在导出子图中。若导出子图不是弦图,则在变为原图的加边过程中,肯定不能添加到一条弦切开导出子图中 的环。与题设矛盾,所以该导出子图一定为弦图。
在弦图中,若 存在割集,则 的极小点割集的导出子图为团。
-
证明:
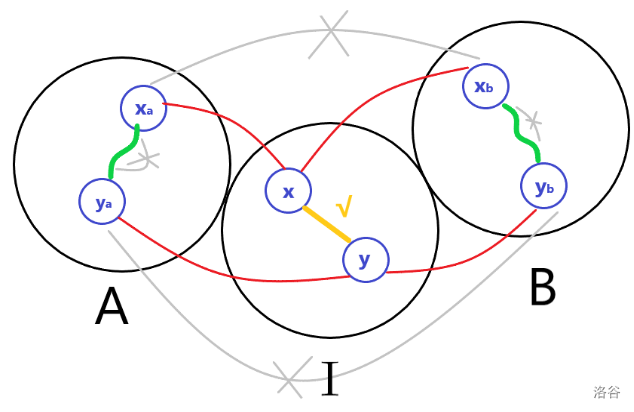 设 的极小点割集为 ,删去 后 所在的连通块为 。若极小点割集点数 ,显然是团。若点数 ,设极小点割集上有两点 ,则 一定与 之间的点有边相连(否则 删去 后仍是点割集,不满足极小点割集定义)。设其相连的点分别为 ,则一定存在环 ,其中, 表示 到 的最短路(默认边权为 )。显然该环的大小一定 ,所以环上肯定存在弦。因为这条弦不能连接 (否则 不是点割集),不能在 或 内连接(否则 不是最短路),所以该弦一定连接 。因此 中任意两点 都有边相连,证毕。
设 的极小点割集为 ,删去 后 所在的连通块为 。若极小点割集点数 ,显然是团。若点数 ,设极小点割集上有两点 ,则 一定与 之间的点有边相连(否则 删去 后仍是点割集,不满足极小点割集定义)。设其相连的点分别为 ,则一定存在环 ,其中, 表示 到 的最短路(默认边权为 )。显然该环的大小一定 ,所以环上肯定存在弦。因为这条弦不能连接 (否则 不是点割集),不能在 或 内连接(否则 不是最短路),所以该弦一定连接 。因此 中任意两点 都有边相连,证毕。
非完全图的弦图至少存在两个不相邻的单纯点。
-
证明:考虑用归纳法证明。假设现在已经证明了点数 的弦图满足引理。对于点集为 ,边集为 的弦图,若为完全图,显然满足引理;若不是完全图,则一定存在 满足 ,也就是 之间一定存在点割集。设 的极小点割集为 ,设删去 后, 所在的连通块为 。由于 是导出子图,根据 可知, 是弦图。由 可知, 是团,即弦图。所以图 一定也是弦图,且点数 。所以 满足引理。若 是完全图,则每个点都是单纯点, 中一定含有单纯点;若 不是完全图,由 可知 是团,只有一个不相邻的单纯点,所以 中一定含有单纯点。同理可得 中也含有单纯点。又因为 存在割集,所以 中的单纯点不相邻,符合引理。又因为当点数 时符合引理(手膜一下就好),所以任何弦图都符合引理,证毕。
一个无向图是弦图当且仅当其有完美消除序列。
-
证明:若无向图是非弦图且存在完美消除序列,找到完美消除序列中最靠前出现的点 ,满足 存在于一个 且无弦的环上。设在环上与其相邻的点为 ,则 在弦图中的位置位于 后。根据完美消除序列的定义可得 之间有边相连,与题设矛盾。所以非弦图没有完美消除序列(必要性)。假设点数为 的弦图有完美消除序列,对于点数为 的弦图,删去一个单纯点(由 可知,弦图存在消除点),由 可知,剩下的导出子图为弦图,存在完美消除序列;再将删除的单纯点放到完美消除序列的开头即可(充分性)。
最大势算法( 算法)
一种线性求弦图完美消除序列的算法。
设 表示点 与多少已标号的点相邻,算法流程如下:
-
将一个 值最大的点标号,并插入完美消除序列的开头。
-
更新点的 值。
-
重复 步至所有点都被标号。
-
正确性证明:设 表示 在最大势生成的序列中的位置。证明一个序列是完美消除序列,等价于证明对于序列中的数 ,若 与 相连且 , 一定有边相连(考虑前 项满足完美消除序列特征,归纳法证明即可)。
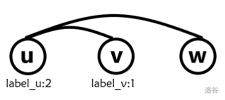
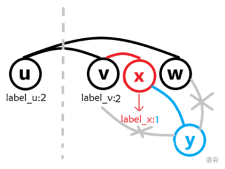
 假设 与 没有边相连(如左图),为了保证 ,一定存在点 满足 ,且 与 有边相连,与 没有边相连。同样还有 与 没有边相连,否则会出现 的环且环上无弦,与弦图定义矛盾(如右图)。
假设 与 没有边相连(如左图),为了保证 ,一定存在点 满足 ,且 与 有边相连,与 没有边相连。同样还有 与 没有边相连,否则会出现 的环且环上无弦,与弦图定义矛盾(如右图)。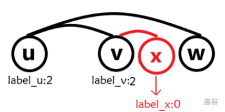
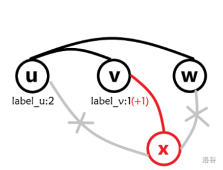
 若 (如左图),因为 无边相连, 有边相连,为了保证 ,一定存在点 满足 ,且 与 相连,与 不相连(否则会存在 的环,如右图)。
若 (如左图),因为 无边相连, 有边相连,为了保证 ,一定存在点 满足 ,且 与 相连,与 不相连(否则会存在 的环,如右图)。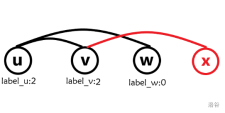
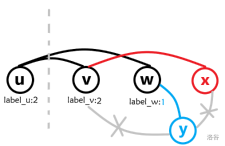 若 (如左图),因为 有边相连, 无边相连,为了保证 ,一定存在点 满足 且 与 相连,与 不相连(否则会存在 的环,如右图)。可以发现,该结论会引入新节点 ,为了使 满足完美序列特征,用上述方式继续分析,会不断引入新节点。最终肯定会出现矛盾。
若 (如左图),因为 有边相连, 无边相连,为了保证 ,一定存在点 满足 且 与 相连,与 不相连(否则会存在 的环,如右图)。可以发现,该结论会引入新节点 ,为了使 满足完美序列特征,用上述方式继续分析,会不断引入新节点。最终肯定会出现矛盾。
实现的话还有些细节。考虑开 个双向链表 , 存储 的所有点。
步骤 更新时,直接将更新后的点插入对应的 中并更新 ,不用删除更新前的点。
步骤 找点时,暴力从当前更新的 开始找,不符合条件的从链表中删除(即步骤 中未删除的更新前的点),找到第一个符合条件的点为止。注意,若 中所有点都被删除了, 值减一。
CPP
#include<bits/stdc++.h>
using namespace std;
const int maxn=10010;
const int maxm=1000010;
inline int read(){
int x=0;
char c=getchar();
for(;!(c>='0'&&c<='9');c=getchar());
for(;c>='0'&&c<='9';c=getchar())
x=(x<<1)+(x<<3)+c-'0';
return x;
}
struct edge{
int v,to;
}e[maxm<<1];
int head[maxn],ecnt;
void addedge(int u,int v){
e[++ecnt].v=v,e[ecnt].to=head[u],head[u]=ecnt;
}
vector<int>v[maxm];
//用vector模拟链表
int rnk[maxn],id[maxn];
//rnk[x]:x在完美消除序列中的位置
//id[i]:完美消除序列第i位的值
int label[maxn];
int n,m,ans;
void MCS(){
bool flag=0;
int Maxl=0,x;
for(int i=1;i<=n;i++)
v[0].push_back(i);
for(int t=n;t;t--){
while(!flag){
while(!v[Maxl].empty())
if(rnk[*(v[Maxl].end()-1)]||label[*(v[Maxl].end()-1)]!=Maxl)
v[Maxl].pop_back();
//判断两种不合法的情况
//其实第二个判断没必要,想一想为什么
else if(label[*(v[Maxl].end()-1)]==Maxl){
x=(*(v[Maxl].end()-1)),flag=1;
v[Maxl].pop_back();
break;//选点
}
if(!flag) Maxl--;
//v_Maxl中不存在合法点
}
id[t]=x,rnk[x]=t,flag=0;
for(int i=head[x];i;i=e[i].to)
if(!rnk[e[i].v]){
v[++label[e[i].v]].push_back(e[i].v);
Maxl=max(Maxl,label[e[i].v]);
//插入点,更新Maxl
}
}
}
int main(){
int x,y;
n=read(),m=read();
for(int i=1;i<=m;i++){
x=read(),y=read();
addedge(x,y),addedge(y,x);
}
MCS();
return 0;
}
-
时间复杂度证明:每条边最多会让一个点加入链表中,所以链表的插入和删除复杂度为 。 每次找点时,最劣情况为 一直降到 ,所以最劣复杂度为 。由于每一个点只会对 进行一次有效更新(在被标号时),所以 。又因为每条边只会对 贡献 ,所以 。因此总时间复杂度不高于 。
应用
弦图的精髓就是最大势算法。关于弦图的所有应用,基本上都是通过最大势算法求解。
由 可知,非弦图是没有完美消除序列的,而通过最大势算法,我们一定可以得到一个 到 的排列,所以只需要判断该排列是否为完美消除序列即可。
暴力判定是 的,考虑更高效的判定方法。
假设对于序列的后 项 仍满足完美消除序列的特征,考虑判定 是否也满足完美消除序列特征。
设 与 中直接相连的点为 ,根据完美消除序列的定义可知, 的导出子图是完全图,又因为 已经与剩余的点直接相连,所以只需要满足 的导出子图是完全图即可。
又因为 满足完美消除序列特征,所以只要 与剩余的点都相连, 的导出子图一定是完全图。
因此,对于每个点 ,只需要分别求出其对应的 ,然后判断 是否与剩余点直接相连即可。
将每条边 压成一个数存入哈希表,每次查询即可。时间复杂度 。
部分代码如下:
CPPstruct Hash{
int u,v,to;
}H[maxm<<1];
int Head[p],hcnt;
void addhsh(int x,int u,int v){
H[++hcnt].u=u,H[hcnt].v=v,H[hcnt].to=Head[x],Head[x]=hcnt;
}
void Insert(int u,int v){
int x=(u*(n+1ll)+v)%p;
for(int i=Head[x];i;i=H[i].to)
if(H[i].u==u&&H[i].v==v) return ;
addhsh(x,u,v);
}
bool Be(int u,int v){
int x=(u*(n+1ll)+v)%p;
for(int i=Head[x];i;i=H[i].to)
if(H[i].u==u&&H[i].v==v) return 1;
return 0;
}
//以上是哈希表
int main(){
int x,y;
n=read(),m=read();
for(int i=1;i<=m;i++){
x=read(),y=read();
Insert(x,y),Insert(y,x);
addedge(x,y),addedge(y,x);
}
mcs();int cnt=0,flag=1;
for(int i=n;i&&flag;cnt=0,i--){
for(int j=head[id[i]];j;j=e[j].to)
//找到与id[i]相连且在序列后方的所有节点,存入tmp
if(rnk[e[j].v]>i){
tmp[++cnt]=e[j].v;
if(rnk[e[j].v]<rnk[tmp[1]])
swap(tmp[1],tmp[cnt]);
}
for(int j=2;j<=cnt;j++)
//哈希判断v_c1是否与v_cj相连
if(!Be(tmp[1],tmp[j])){
printf("Imperfect\n");
flag=0;break;
}
}
if(flag) printf("Perfect\n\n");
return 0;
}
设图 的最小染色数为 ,最大团为 ,有结论 。
-
证明:由于完全图每个点的颜色都不一样,所以有 。考虑一种构造染色数的方法,即按照完美消除序列倒序染色。设构造出的染色数为 。首先一定有 。当对点 进行染色时,只有 中的点才会对其颜色进行限制( 序列沿用
弦图判定一节的定义)。由弦图判定一节可知, 是完全图,即两两颜色都不同,所以对于点 来说,颜色数为 。因此,。从而有 ,得 。
同时也得到了 的线性求解方法。
注意,如果只求染色数而不用求染色方案,则答案为 ( 等价于在完美消除序列中,处于点 后且与点 直接相连的点的个数)。
主要代码如下:
CPPint main(){
int x,y;
n=read(),m=read();
for(int i=1;i<=m;i++){
x=read(),y=read();
addedge(x,y),addedge(y,x);
}
MCS();
for(int i=1;i<=n;i++)
ans=max(ans,label[i]+1);
//求解答案,正确性已证明
printf("%d\n",ans);
return 0;
}
设图 的最小团覆盖数为 ,最大独立集为 。
仍然有结论 。
-
证明:由于每个团中最多选一个点,所以有 。考虑一种构造独立集的方法,即按照完美消除序列顺序求独立集。设选出的点数为 。首先肯定有 。每个点 选完后,在 后方且与 有边相连的点都不能选,根据完美消除序列的定义, 支配了一个团。所以 也是一个团覆盖数,有 。,结合两者得 。
同时也得到了 的线性求解方法(每条边只遍历一次,显然线性)。
主要代码如下:
CPPint main(){
int x,y;
n=read(),m=read();
for(int i=1;i<=m;i++){
x=read(),y=read();
addedge(x,y),addedge(y,x);
}
MCS();int ans=0;
for(int i=1;i<=n;i++)
if(!vis[id[i]]){
ans++;
for(int j=head[id[i]];j;j=e[j].to)
vis[e[j].v]=1;
}
printf("%d\n",ans);
return 0;
}
另外,显然有最小点覆盖等于最小团覆盖。
区间图定义:有若干个区间,把每个区间当做一个点,两个点之间有连边当且仅当两个区间有交集。
以下是一个区间图的构造:
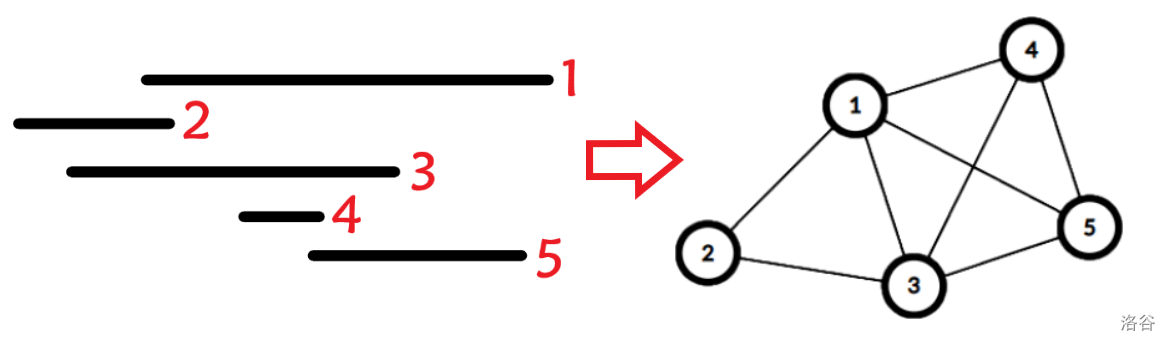
之所以提到区间图,是因为区间图有一个很好的性质——所有的区间图都是弦图。
-
证明:首先,如果环长 ,该环一定是团,可构造(可以看做环上每一条边都是弦)。假设区间图存在无弦的环 ,由于无弦, 两两交集位置一定严格单调递增或递减(可以手膜一下,如果不单调一定有弦),则 的交集一定为空,矛盾。
对于区间问题,可以先构造区间图,再根据弦图的性质求解。
(不过有一说一这个用处不大,毕竟区间图还有很多更优的性质qwq)
相关推荐
评论
共 38 条评论,欢迎与作者交流。
正在加载评论...