专栏文章
题解:P3373 【模板】线段树 2
P3373题解参与者 3已保存评论 3
文章操作
快速查看文章及其快照的属性,并进行相关操作。
- 当前评论
- 3 条
- 当前快照
- 1 份
- 快照标识符
- @miprsg1u
- 此快照首次捕获于
- 2025/12/03 16:53 3 个月前
- 此快照最后确认于
- 2025/12/03 16:53 3 个月前
本题解使用 动态开点线段树。
方法
暴力时间复杂度 ,肯定挂,考虑线段树。
复习线段树
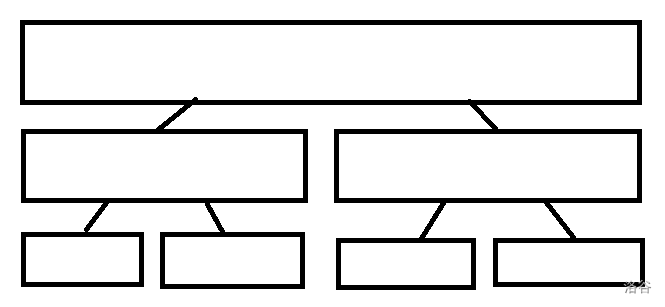
线段树,将每一个区间分成个两个长度为 的区间,下图是一棵长度 为 的线段树,每个点维护一个值 。
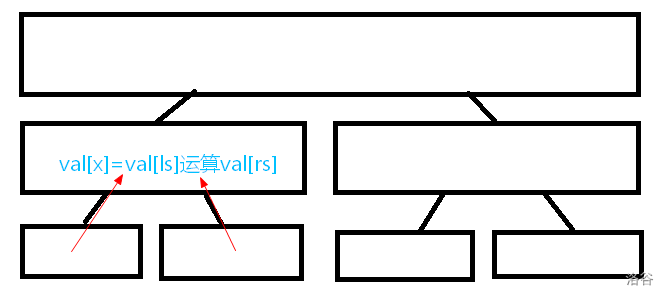
建树
对于每个线段 ,先建自己的子树,到最后一层时初始化 ,接下来更新上方的 。
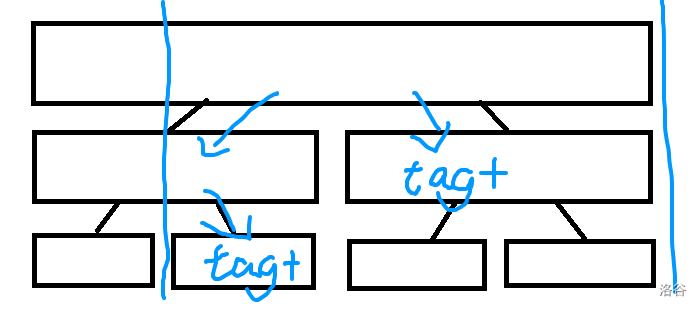
修改
考虑对每个区间修改,发现时间复杂度 ,比暴力还差。
考虑当这个修改覆盖这一整个区间时,使用懒标记 记录,当下次修改或查询时将懒标记下传给左右子数,别忘了更新上方的 。
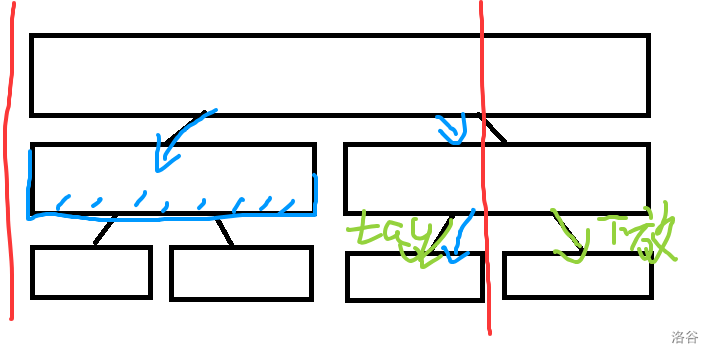
查询
几乎与修改一样,这个查询覆盖这一整个区间时,直接返回 ,当下次修改或查询时将懒标记下传给左右子数。
本题题解
考虑将 分成两个,加法标记 和乘法标记 。其余同上。
注意事项
在下放 标记时受 标记影响,更新 时先乘后加。
初始化为 。
在乘法时也要更新 标记,相当于 也变成了多倍。
代码
CPP#include<bits/stdc++.h>
#define int long long
using namespace std;
const int N=400010;
int n,q,m,a[N],rt,tc;
int ls[N],rs[N],val[N],add[N],mul[N];
void pushup(int x){ // 更新val,上传
val[x]=(val[ls[x]]+val[rs[x]])%m;
}
void pushdown(int x,int l,int r){ // 更新 tag,下放(l,r 为区间左右端点)
int mid=(l+r)>>1;
val[ls[x]]=(val[ls[x]]*mul[x]+add[x]*(mid-l+1))%m; // 先乘后加
val[rs[x]]=(val[rs[x]]*mul[x]+add[x]*(r-mid))%m;
mul[ls[x]]=(mul[ls[x]]*mul[x])%m;
mul[rs[x]]=(mul[rs[x]]*mul[x])%m;
add[ls[x]]=(add[ls[x]]*mul[x]+add[x])%m; // add 更新受 mul 影响
add[rs[x]]=(add[rs[x]]*mul[x]+add[x])%m;
mul[x]=1;
add[x]=0;
}
void build(int &x,int l,int r){ // 建树(l,r 为区间左右端点)
x=++tc;
add[x]=0;mul[x]=1; // 乘法初始化为 1
if(l==r){
val[x]=a[l];
return;
}
int mid=(l+r)>>1;
build(ls[x],l,mid);
build(rs[x],mid+1,r);
pushup(x);
}
void update1(int x,int l,int r,int ql,int qr,int v){ // 乘法更新(l,r 为区间左右端点,ql,qr 为查询左右端点)
if(ql<=l&&r<=qr){ // 整个区间在更新范围内,打 tag
val[x]=(val[x]*v)%m;
mul[x]=(mul[x]*v)%m;
add[x]=(add[x]*v)%m; // add 标记也会被乘法更新
return;
}
pushdown(x,l,r);
int mid=(l+r)>>1;
if(ql<=mid) update1(ls[x],l,mid,ql,qr,v); // 若左子区间在更新范围内,更新
if(mid<qr) update1(rs[x],mid+1,r,ql,qr,v); // 同上
pushup(x);
}
void update2(int x,int l,int r,int ql,int qr,int v){ // 加法更新(l,r 为区间左右端点,ql,qr 为查询左右端点)
if(ql<=l&&r<=qr){
val[x]=(val[x]+v*(r-l+1))%m;
add[x]=(add[x]+v)%m;
return;
}
pushdown(x,l,r);
int mid=(l+r)>>1;
if(ql<=mid) update2(ls[x],l,mid,ql,qr,v);
if(mid<qr) update2(rs[x],mid+1,r,ql,qr,v);
pushup(x);
}
int query(int x,int l,int r,int ql,int qr){ // 查询(l,r 为区间左右端点,ql,qr 为查询左右端点)
if(ql<=l&&r<=qr) return val[x];
pushdown(x,l,r);
int mid=(l+r)>>1,ans=0;
if(ql<=mid) ans=(ans+query(ls[x],l,mid,ql,qr))%m;
if(mid<qr) ans=(ans+query(rs[x],mid+1,r,ql,qr))%m;
return ans;
}
signed main(){
ios::sync_with_stdio(0);
cin.tie(0);
cout.tie(0);
cin>>n>>q>>m;
for(int i=1;i<=n;i++) cin>>a[i];
build(rt,1,n);
while(q--){
int op,x,y,k;
cin>>op>>x>>y;
if(op==1){
cin>>k;
update1(rt,1,n,x,y,k);
}else if(op==2){
cin>>k;
update2(rt,1,n,x,y,k);
}else{
cout<<query(rt,1,n,x,y)<<"\n";
}
}
return 0;
}
相关推荐
评论
共 3 条评论,欢迎与作者交流。
正在加载评论...