专栏文章
题解:P5189 [COCI 2009/2010 #5] ZUMA
P5189题解参与者 3已保存评论 3
文章操作
快速查看文章及其快照的属性,并进行相关操作。
- 当前评论
- 3 条
- 当前快照
- 1 份
- 快照标识符
- @mip2a1lm
- 此快照首次捕获于
- 2025/12/03 04:59 3 个月前
- 此快照最后确认于
- 2025/12/03 04:59 3 个月前
做法
我写的详细一点。
每次消除一个区间,很容易让人想到用 表示将 这一段消除,所需要添加的弹子数量。转移的时候,想要把 消除,要么是将 单独添加一些弹子消除,要么与 的一些同色弹子合并,再添加一些弹子消除。
但是当我们要将 和前面的一些弹子合并消除的时候,没法知道之前还剩下几个同色弹子,就没法知道要添加多少了。如果新增状态表示之前弹子的情况,状态数就炸了。
如果能构造一个状态,使得这次合并在前面与 合并的那个弹子的位置就被预料到并且计算了花费,然后在处理 这一段的时候再调用,问题就解决了。
-
直接消除 和后面的 个:。
-
假设 ,将 和后面的 个与 合并:。
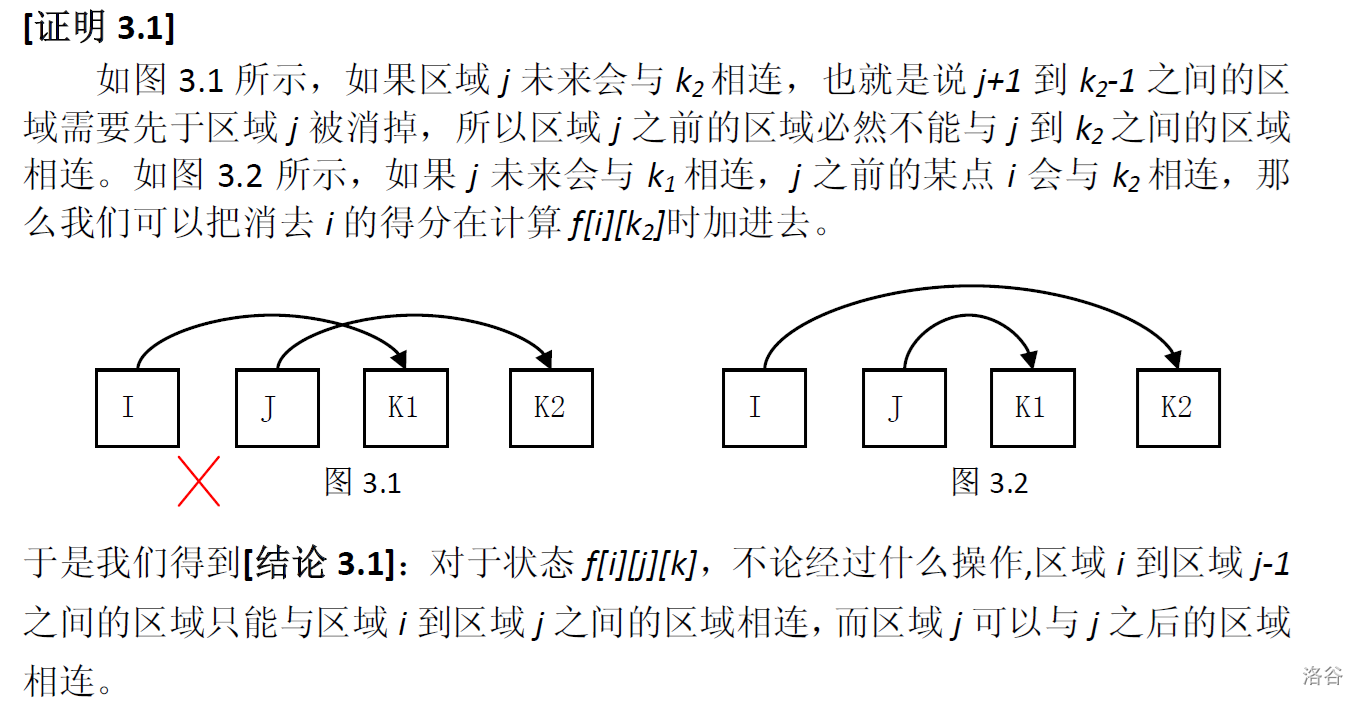
那为什么只需要考虑 和后面的弹子合并,不需要考虑 的弹子和后面的弹子合并呢?借用一下 2009 集训队论文 徐源盛 《对一类动态规划问题的研究》中的一段话。
这样已经可以过了,但 个弹子合并都不需要额外添加弹子,所以 dp 数组的第三维其实只用算到 即可。最终时间复杂度 。
代码
CPP#include<bits/stdc++.h>
#define int long long
#define pii pair<int,int>
#define i128 __int128
#define ALL(x) x.begin(),x.end()
#define popcount(x) __builtin_popcountll(x)
#ifdef LOCAL
#include "debug.h"
#else
#define debug(...) 42
#endif
using namespace std;
const int INF=1e18;
const int N=105;
const int MOD=1e9+7,MOD2=998244353;
int n,k,a[N],f[N][N][6];//和j后面本来就存在的k个一起消除
void solve_(){
cin>>n>>k;
for(int i=1;i<=n;i++){
cin>>a[i];
}
for(int len=1;len<=n;len++){
for(int i=1;i+len-1<=n;i++){
int j=i+len-1;
for(int x=0;x<k;x++){
f[i][j][x]=f[i][j-1][0]+max(0ll,k-x-1);
for(int p=i;p<j;p++){
if(a[p]==a[j]){
f[i][j][x]=min(f[i][j][x],f[i][p][min(k-1,x+1)]+f[p+1][j-1][0]);
}
}
}
}
}
cout<<f[1][n][0]<<"\n";
}
signed main(){
ios::sync_with_stdio(false);
cin.tie(0);
cout.tie(0);
int testcase,multitest=0;
if(multitest)cin>>testcase;
else testcase=1;
while(testcase--){
solve_();
}
return 0;
}
相关推荐
评论
共 3 条评论,欢迎与作者交流。
正在加载评论...